Festo a mis en ligne jeudi une vidéo impressionnante d’une main robotique. Toujours dans l’esprit du biodesign, la main est capable de manipuler un objet à facette d’une seule main en le faisant tourner avec ses doigts dans la paume de la main, exactement comme le ferait un humain. Les mouvements d’articulation sont provoqués par des pompes et la circulation d’air en poussée ou en aspiration.
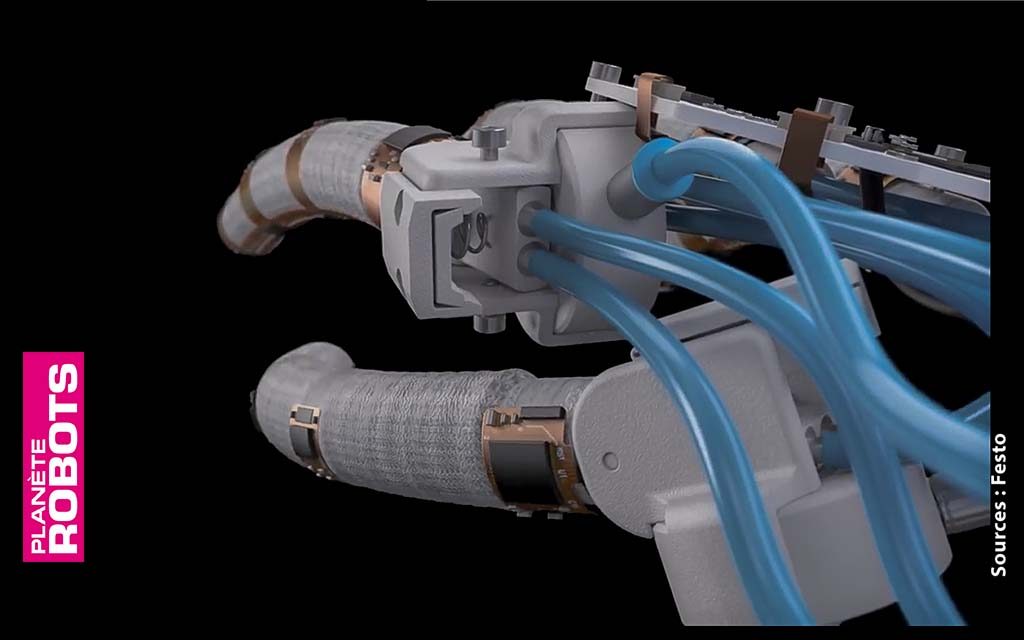
Dans la foulée, Festo a aussi révélé un bras souple relativement éloigné du bras inspiré d’une trompe d’éléphant que Festo avait ajouté à son catalogue en 2012. À l’extrémité de ce bras souple, on peut trouver plusieurs possibilités d’appendices de préhension, comme par exemple la main précédemment citée, mais aussi un système de préhension par vide d’air dans une surface souple, ce qui lui permet en quelque sorte d’aspirer de petits objets, il ne reste plus ensuite à l’équipement qu’à regonfler la surface souple pour repousser les objets et les faire tomber à l’endroit désiré. On peut aussi trouver une main simplifiée composée de deux pinces, chaque pince étant une paire de doigts jumelés recouvert une surface souple.