Encore une nouvelle main robot ?
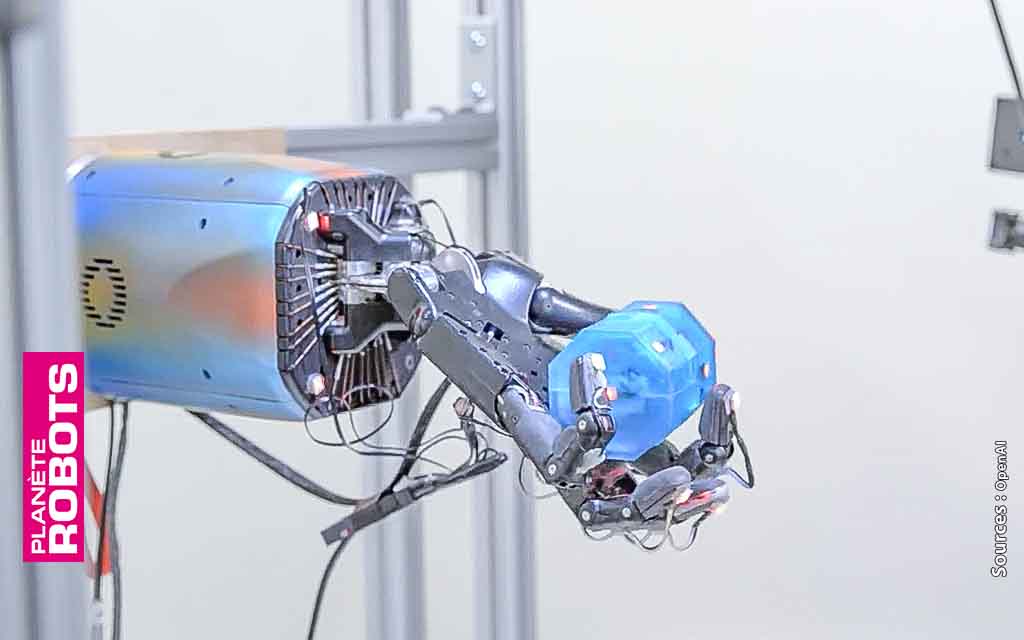
Oui mais cette main a appris, virtuellement.
Ce qui est intéressant c’est que les développeurs ont mis en place un système qui a permis d’accélérer l’apprentissage du robot, plutôt que d’avoir plusieurs robots dans un hangar qui fonctionnent pendant des années, ici c’est un programme qui simule les conditions réelles.
S’ils avaient laissé apprendre le robot par lui-même, cela aura pris plusieurs dizaines d’années. Tous les mouvements possibles et nécessaires à la correcte orientation du cube ont été simulées.
100 années auraient été nécessaires à cette main robot pour accomplir cette réussite de préhension spectaculaire !
Sources :
https://blog.openai.com/learning-dexterity/