Le laboratoire des robots re-configurables de l’École Polytechnique de Lausanne travaille sur des robots fourmis, dans ce sens où leurs robots d’une taille très réduite travaillent ensemble et communiquent ensemble et se déplacent au sol.
Les robots fourmis sont développés par deux doctorants, Jamie Paik et Zhenishbek Zhakypov.
Ce dernier est passionné par les robots qui sont créés à base de pliage de circuits intégrés, la structure pliable confère beaucoup de rigidité et de légèreté à un micro robot. Les robots ne pèsent pas plus de 10 grammes, leur design est conçu un peu comme des origamis d’où le nom de ses robots les Robogamis. Dans les universités précédentes avant l’université de polytechnique de Lausanne, il a travaillé à la conception d’actionneur piézoélectrique de micro usines, et à la conception de mécanismes disposant d’une précision nanométrique.
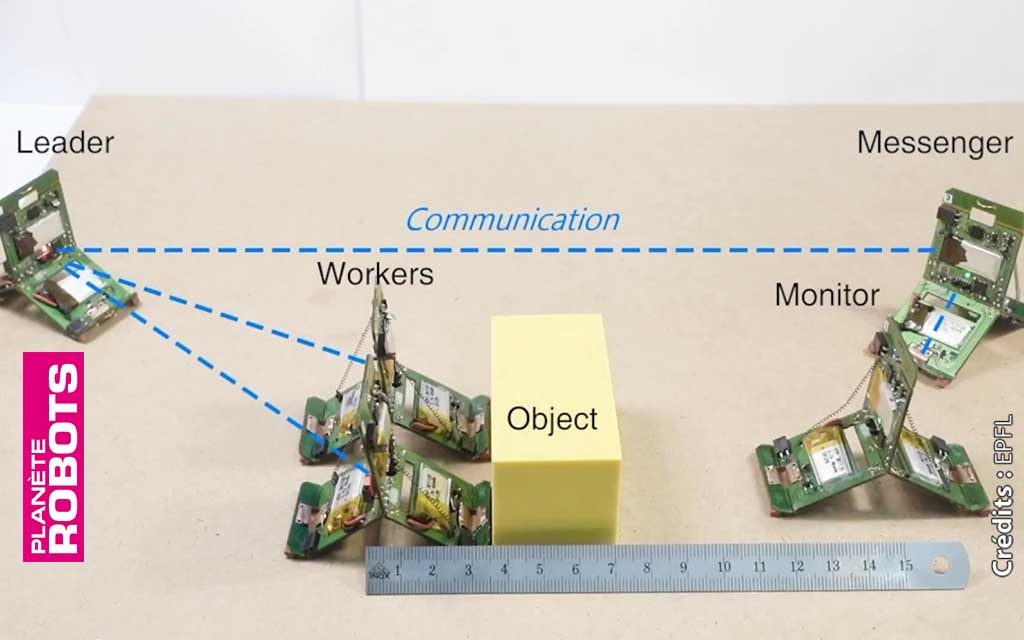
Les robots sur lesquels travaille le laboratoire des robots re-configurables, fondé par Jamie Paik, sont capables de changer leur forme, de se déplacer en tournant sur eux-mêmes, ils sont aussi capables de collaborer, pour pousser des objets, enjamber des obstacles, ou sauter par-dessus.
source :
