Un nouvel exemple qui montre comment la modélisation virtuelle d’un robot permet d’améliorer les performances de déplacements de ce dernier. L’Ecole polytechnique fédérale de Zurich en association avec RSL et leur robot quadrupède ANYmal viennent de finir de convaincre celles et ceux qui étaient sceptiques quant à l’utilisation de la réalité virtuelle pour achever la formation d’un robot padawan.
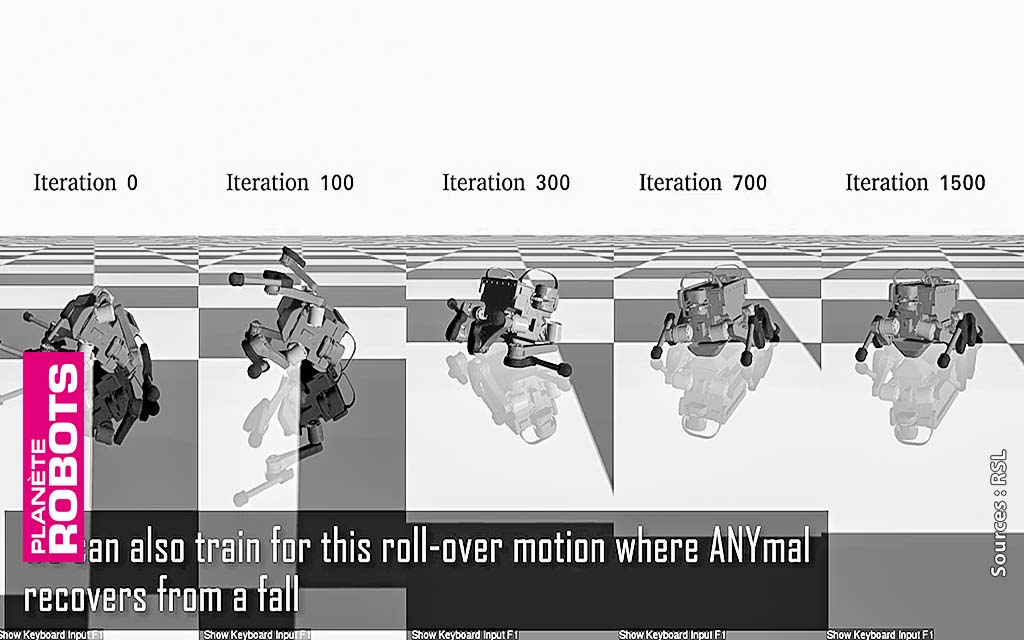
La technique employée consiste à utiliser les réelles données de l’électronique et la mécanique des membres du robot ANYmal, et de les utiliser au travers de calculs dans un monde virtuel dans lequel le robot va être confronté à des comportements à avoir dans des situations toutes plus particulières les unes des autres. Par exemple pour se remettre sur ses pattes lorsqu’il a glissé par l’avant, ou sur le côté etc…
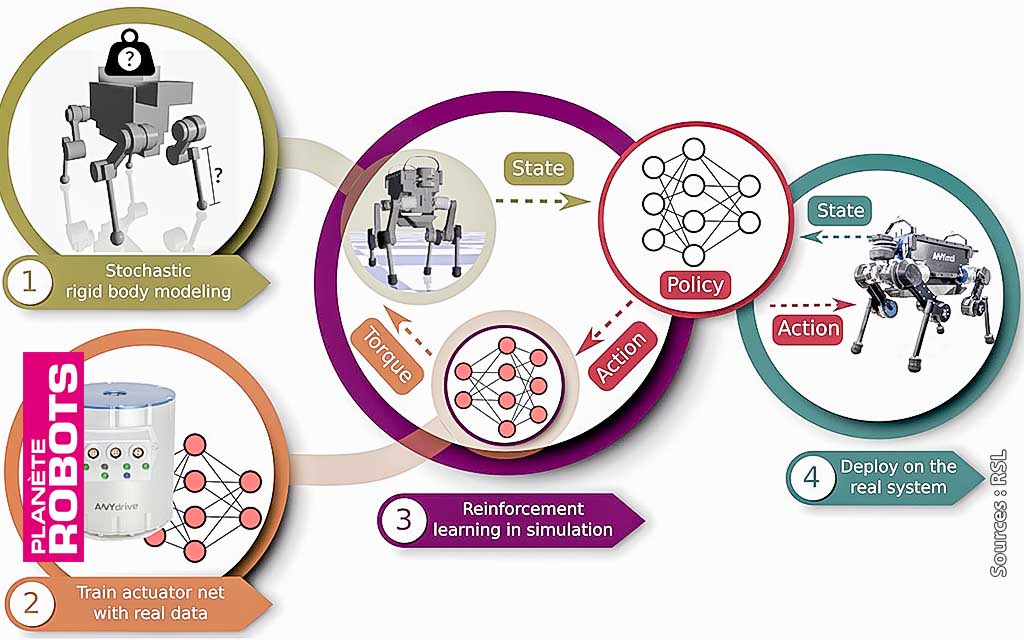
Les résultats positifs des simulations dans lesquels le robot a réussi à s’en sortir, sont retransmises au robot réel qui va ensuite mettre en application et réussir avec succès .
