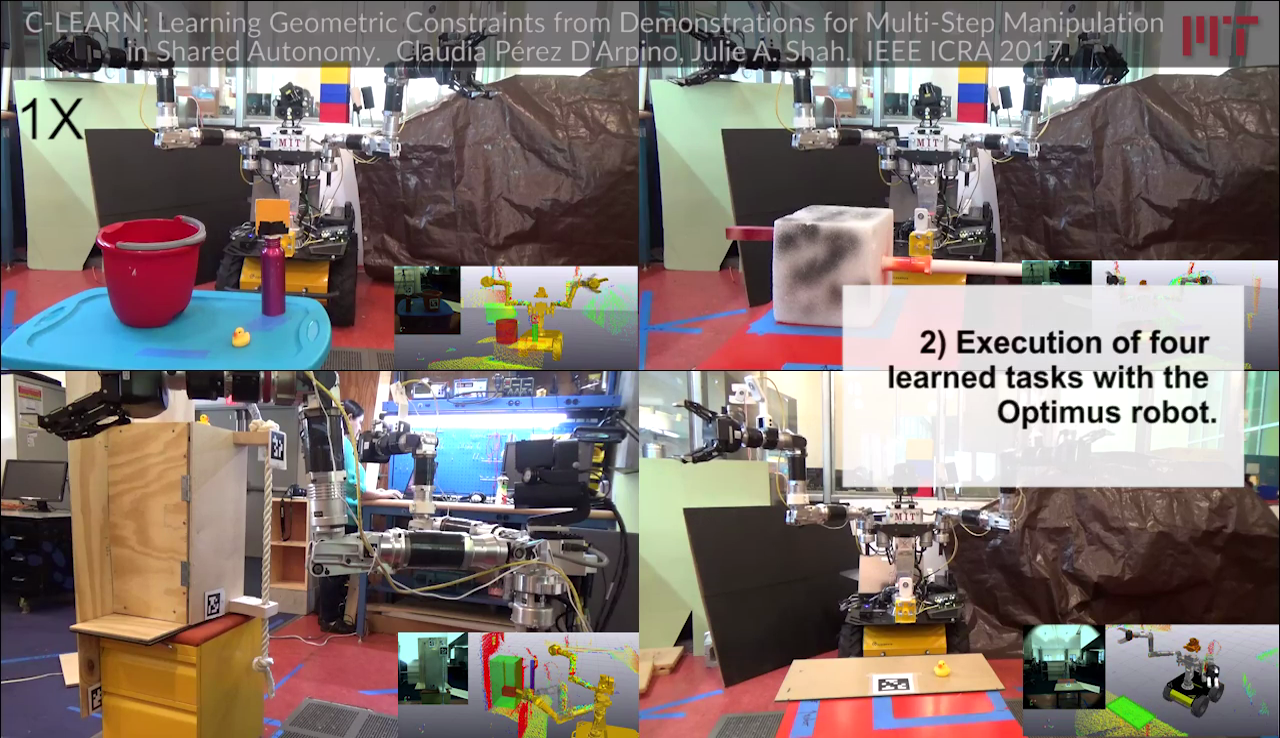
Nous allons bientôt pouvoir laisser les robots se débrouiller entre-eux 🙂 Il faudra juste bien leur mâcher le travail, pour ce faire, des chercheurs du Computer Science and Artificial Intelligence Laboratory (CSAIL) du MIT travaillent sur une nouvelle méthode d’apprentissage des robots, appelée C-LEARN.
Cette technique qui permet à un robot d’apprendre à ouvrir une porte par exemple, pourra être transférée sur un autre robot dont la taille est différente.
Mais la façon dont le robot a appris à faire ces mouvements pour ouvrir une porte peut être utile sur un autre à la structure différente pour attraper un objet. Il faut voir un peu tous les mouvements clés du robot comme des briques de LEGO, dans une boîte à mouvement, qui donnent une zone d’influence précise pour un robot à la cinétique particulière.
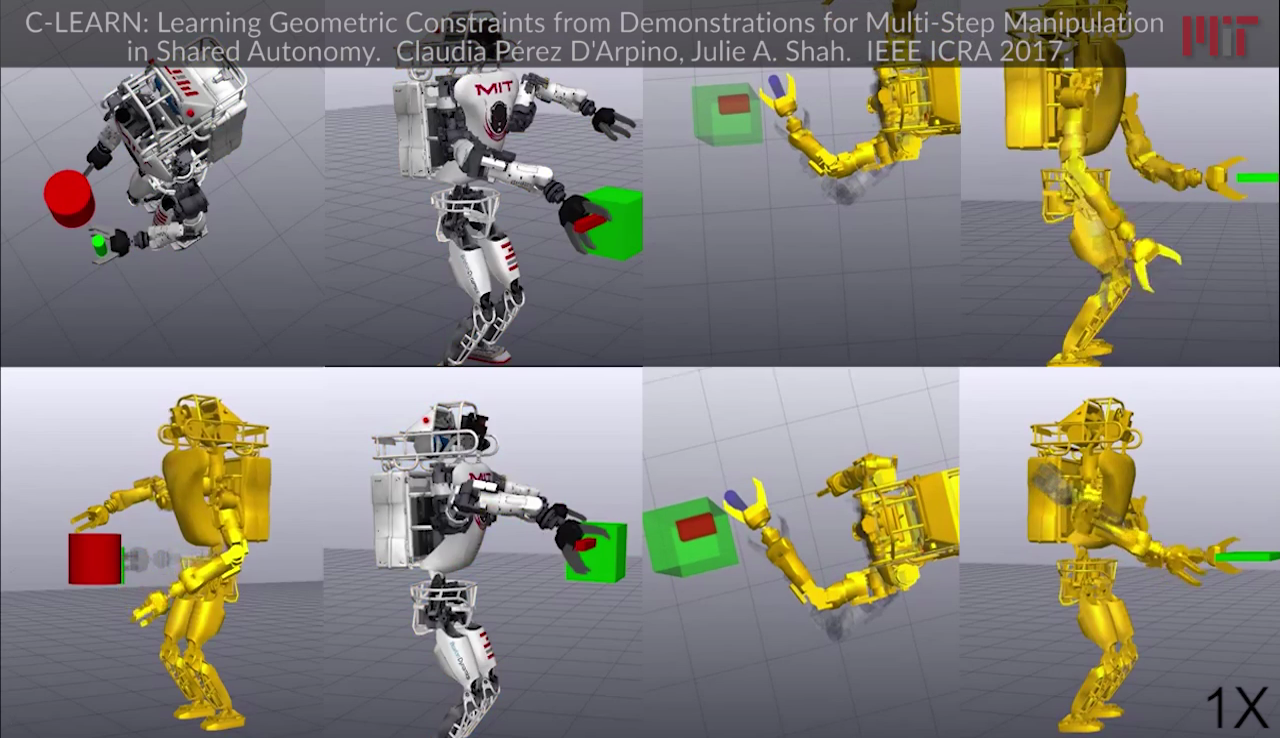
Avec le C-LEARN (C pour contraintes), des robots aux cinématiques différentes pourraient apprendre à s’adapter, à utiliser ces mouvements clés pour faire d’autres tâches qui ont une approche de mouvements similaires qu’ils n’avaient pas forcément appris.