Attention aux âmes sensibles tout de même dans l’article d’aujourd’hui, si vous êtes effrayé(e)(s) facilement par les insectes qui peuvent se balader au sol, si vous aimez les robots, vous n’aurez peut-être pas si peur que ça… 🙂 On va parler des insectes et pas des aranéides, nous resterons sur 6 pattes…
Une équipe internationale d’ingénieurs, chercheurs de l’UNIL (université de Lausanne) et de l’EPFL (École polytechnique fédérale de Lausanne) a développé un robot à six pattes qui se déplace beaucoup plus rapidement que d’autres robots hexapodes constitués comme des insectes.
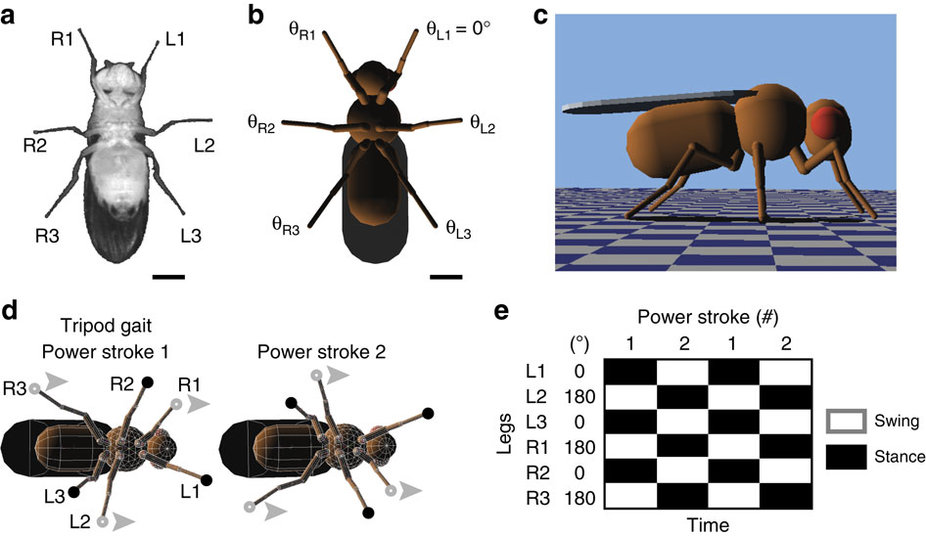
Les membres qui définissent un insecte sont constitués de 3 paires de pattes articulées. Les insectes se déplacent dans une coordination qu’on appelle marche tripode : trois des six pattes sont toujours en contact avec le sol.
” Nous avons voulu déterminer pourquoi les insectes utilisent une démarche trépied et d’identifier si c’est, en effet, le moyen le plus rapide pour les animaux à six pattes et les robots de marcher. “
” Nos résultats soutiennent l’idée que les insectes utilisent une démarche trépied pour marcher plus efficacement sur des surfaces en trois dimensions et parce que leurs jambes ont des propriétés adhésives. Cela confirme une hypothèse biologique de longue date. Les robots au sol doivent donc se libérer de l’utilisation de la marche du trépied.”
Partant du principe que moins il y a de pattes en contact avec le sol, moins il y a de frottement, donc la marche est plus efficace. Les ingénieurs par le biais de nouveaux algorithmes ont imaginé une nouvelle marche bien plus efficace pour un hexapode, mais toujours en s’inspirant de la nature, avec ici, la mouche 🙂
Par des expériences faites sur les insectes, les chercheurs ont mis en évidence des particularités de la marche tripode propres à cette mouche, et l’ont transformé en marche bipode plus adaptée aux robots, qui eux n’ont pas forcément besoin de cette adhésion lors de la marche.
Les chercheurs de Lausanne ont testé leur nouvelle marche bipode sur l’insecte biologique directement en annulant chimiquement l’adhérence des pattes, et le résultat a été surprenant, la mouche modifiée se déplaçait au sol, plus efficacement que ses congénères… !
Pleurobot, un robot salamandre permet d’étudier l’évolution de la marche
https://www.planeterobots.com/2015/11/28/2529/

